 |
RC Helicopter Set-up by HollyHeli (John Wilson) |
|
RC Helicopter Set-up by HollyHeli (John Wilson) |
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z

The frequency used by the more recent 'spread spectrum' radio technologies (e.g. Spektrum and Futaba FASST) that have many advantages over earlier systems. In particular, radio frequency interference from motors or other flyers is eliminated by using a higher frequency (the same band that wireless routers, cordless phones etc. use) and by uniquely matching a transmitter (Tx) to a receiver (Rx). No 'frequency control' is necessary and aerials (antennae) are short (ideal for helis!). However, read ChopperAddict's warning. Go Back

The frequency traditionally most often used for legally flying models in the UK (it's 72MHz in the US). It is a frequency modulated (FM) technology using a limited number of 'channels' within the band (determined by a crystal or synthesizer) that can be operated in Pulse Position Modulation (PPM or 'FM') or Pulse Code Modulation (PCM), the latter utilises digital principles (although it is still using FM for transmission and reception) but it offers better rejection of interference and allows fail safe features. With more than one flyer in the locality on this band, administrative 'frequency control' is essential to avert disaster! Go Back
Extreme aerobatic flight maneuvers that require coordinated use of all controls and combine together standard aerobatic routines, including inverted flight, often into sequenced displays. Although more often applied to helis, similar styles of flying can be achieved with certain planes. See 'Flight Mode': stunt or idle-2 setting. Go Back
The shape of a wing or blade seen in cross-section that, when moving through a fluid such as air, produces a force perpendicular to the motion called lift. Aerofoils have a characteristic shape with a rounded leading edge, followed by a sharp trailing edge, often with asymmetric camber. For more see Wikipedia. Go Back
Adjustable Function Rate: defines the operational boundaries of any one control function, see 'Swash Mix'. Go Back
Ailerons are used to generate a banking or rolling motion. On an planes, ailerons are small hinged sections on the outboard portion of the wing that work in opposition. On a heli they don't exist, but the term is still used to describe cyclic roll. Go Back
A safety feature on most ESCs ensures that they do not become active ('armed') if a Tx throttle channel signal is absent or if it is above 0%. This prevents a motor running without control, which is a good idea. Go Back
Almost Ready To Fly: an assembled kit that maybe only needs radio gear - and maybe some additional TLC.
Ready To Fly: some (particularly the smaller ones)
'fly out of the box' in competent hands, but many don't. Always check assembly and set-up. With any larger
heli (250 size and up), rebuild the safety critical (rotating) bits
to make sure everything is correctly installed, greased and loctited.
Go Back
Some helis just don't like to cooperate. However, there is the other sort of attitude that in aviation means 'the orientation of the aircraft's axes relative to the direction of airflow or to a horizontal plane' (could mean the ground). More generally, it's the angle (in three dimensions) relative to the direction of movement. Basically, the angle, relative to neutral, that it has pitched, rolled (and yawed) to. In full size aircraft, the 'attitude indicator' or 'artificial horizon' generally ignores yaw. However, there is also a turn coordinator that shows yaw (turn) rate, roll (in newer instruments) and coordination. 'Slip' (sometimes known as 'skid') can occur when the ailerons and rudder are not coordinated properly and happens in helis as well, although full size ones, I believe, don't have modern aircraft type turn coordinators and some may not even have the older 'turn and bank' indicator or an attitude indicator. We RC pilots definitely have only our eyes! Go Back
Adjustable Travel Volume: see End Point. Go Back
Autorotation. Controlled descent (and often landing) without power. Uses the the heli's forward pitched descent to maintain head speed by 'windmilling' using a modest amount of negative collective pitch, followed by positive pitch during the landing 'flare'. Practiced using the 'throttle hold'. Go Back
Angular Vector Control System, otherwise known as a 'Head Hold' (often abbrieviated to 'HH') gyro. Go Back
Specialist tool looking a little like a pair of pliers that facilitates the removal and installation of a plastic ball link onto the ball on a swashplate or control lever. Go Back
A maneuver similar to what a turning plane does, a change in attitude allowing the heli to turn at speed by rolling to the port or starboard whilst in forward motion. A level banked turn requires the coordinated use of the cyclic, collective and often the rudder, to avoid losing height and slipping sideways (or even backwards if a HH gyro is in use). Go Back
Battery Eliminator Circuit: a regulated voltage supply of 4.8v, 5v or 6v dc that powers the heli avionics (Rx, servos, gyro etc., in fact everything except the main motor). So called because, particularly on 'planes (always on gliders), a 4.8v NiCd 4 cell Rx battery pack was often used for this. When a large main flight battery is used, it is common for the BEC to be built into the ESC. Sometimes, however, the BEC needs to be separate from the ESC, particularly when high battery voltages or more than one high current (digital) servo is installed (see: 'Warning about using Digital servos with some ESCs'). Go Back
A combination of two systems designed to control rate of roll or pitch on early full size helis. The Bell system used a weighted stabiliser bar providing inertial lag. The Hiller system used a similar bar, but with small wings or paddles to enhance control of the pitch of the main blades. Whilst the Hiller system is used on small FP model helis, it is relatively unresponsive because pitch control is via the flybar. Most CP helis use a combination of the Bell system (with a link direct from swashplate to blade pitch arms) and the Hiller system (where the flybar provides a proportion of the pitch control via mechanical mixing). See here for a full description and Section 2. Go Back
2.4GHz spread spectrum systems have the huge advantage that the Rx only recognises and responds to the signal from your Tx. To set this up, you have to 'bind' the Rx to a specific Tx, many systems adopt the Tx settings during binding as fail safe settings. Some manufacturers demand only that you switch on the Rx while the Tx is in 'bind mode'. Other systems involves a bind or 'bind release' button on the Rx. Spektrum Rxs require a 'bind plug' to be inserted in the Bat port, prior to turning on the Tx in bind mode. After binding, the plug is removed. Recent Spektrum systems have a 'model match' feature so that if the wrong model is selected on the Tx (i.e. a different one from that used whilst binding), the connection does not initialise. Some technologies generate a new random code each time the Rx and Tx connect, others used a fixed code for each pair of devices. All Txs, however, must have a unique electronic identity; the GUID (Globally Unique Identifier) code.
In the context of servo movement, binding can also refer to servo overload, when the full range of motion is prevented by the swashplate or pitch slider (or some other intermediate linkage) reaching the end of its travel. This is rectified by moving the position of the link on the servo horn closer to the servo output spindle or by adjusting the Swash Mix settings or, on unmixed inputs, the channel 'end points'. Tail pitch slider binding may also be prevented by adjusting the gyro travel adjust or end points. Also, if there is mechanical interference or too much friction in ball linkages that are too tight, the servo can be overloaded in the same way. Go Back
A motor 'bogs' or slows down under a constant throttle or governor setting when overloaded by excessive blade pitch or too high gearing (or both) such that the head speed is not maintained. Also a symptom of an insufficiently powerful motor/ESC combo or a near-exhausted main flight battery. Go Back
The tube or rod between the main fuselage 'pod' or 'cabin' that carries the tail rotor assembly. On models, the boom often houses the tail drive belt or drive ('torque') shaft ('tube'). Non-scale (aerobatic) RC helis are sometimes referred to a 'Pod & Boom'. Go Back
When the main rotor blades hit the heli's boom. Most common in a hard landing when the momentum of the rotor blades bends them down such that they hit the boom; more likely if there is little or no positive pitch at the time. Extreme negative pitch might cause a boom strike on the ground. Go Back

A brushless motor is an electric motor that does not have a commutator and brushes like most cheap dc motors. The one shown is an 'outrunner' motor. It is more akin to an ac induction motor although it is powered by a dc supply and is more efficient and reliable than its brushed equivalent. It requires a matched ESC. Go Back

'Sub-Micro' or 'Mini' 4 channel FP heli, 205mm long, main rotor diameter 180mm, flying weight 50g, a rebadged Walkera 4#3B. Go Back
A US manufacturer of innovative power devices, in particular ESCs. Go Back
Sometimes (unnecessarily) written eCCPM, (electronic) Cyclic/Collective Pitch Mixing: reduces mechanical complexity and increases precision and power of control of the helicopter rotor's swashplate. Done by electronically mixing the cyclic and collective control inputs to coordinate the servos controlling the swashplate height and tilt, often using software, (usually running on the Tx – also see Swash Mix) such that the cyclic servos work together rather than independently controlling pitch, roll and collective. Sometimes confused with the mechanical mixing that goes on above the level of the swashplate in all CP helis. The abbreviation mCCPM (mechanical) is confusing and probably wrong. Heads where the individual servos each separately control fore-aft pitch, roll and collective are non-CCPM (unhelpfully called 'single servo') heads because there is no mixing. Also see 'Swash Type'. Go Back
This is used in two different contexts:
The Rx channel controlling the heli's servos and ESC.
Or, the frequency within the band that the Tx transmits on, determined by the choice of crystal or synthesiser setting. Go Back
In an IC heli, the engine needs to start before the blades start turning, so there is a clutch that only engages as the engine RPM increases. There is also an overrunning clutch that allows the rotors to freewheel (autorotate) if the engine fails in flight. Electric helis do not have a centrifugal clutch since the motor does not need to idle, but they do often have a 'one way' or autorotation bearing (Torrington roller bearing) built into the main drive gear that does the same job as the overrun clutch. Go Back
Computerised Numerical Control: 'CNC' seems to be used in RC heli land to describe any expensive looking shiny bit of metal hardware (often in strange anodised colours much loved by Esky etc. also sometimes known as 'bling'), usually replacing plastic components. CNC is actually the method of manufacture using automated machine tools, such as drills and lathes that operate from instructions in a program. Numerical control (NC) machines are used in manufacturing tasks, such as milling, turning, punching and drilling. If done well, using good initial design and quality materials, this production method produces very precise, well balanced, rotor head assemblies etc. at mass-production prices. Go Back
Literally 'sharing an axis'; the drive shafts have a common centre of rotation, so one must be, hollow allowing the other to rotate within it. Each shaft drives similar sized rotor blades, which go in opposite directions (counter rotating) to cancel out torque (twisting) forces, making a tail rotor unnecessary. Go Back
Centre (center) of Gravity:
Physics definition: The point in or near a body at which the gravitational
potential energy of the body is equal to that of a single particle of the same mass located at that point
and through which the resultant of the gravitational forces on the component particles of the body acts.
Engineering definition: where it balances!
Go Back
On a CP heli, to increase or decreasing overall lift, the angle of attack for main rotor both/all blades is collectively altered by equal amounts at the same time resulting in ascents, descents, acceleration and deceleration. The 'collective' (control) (Tx left stick in Mode II, combined with the throttle) achieves this when moved up and down (forward and back if the Tx is on its back). Go Back
Collective Pitch: lift or flying speed is controlled by variable main blade angle (pitch) rather than rotational speed (as in FP helis). Go Back
On both CP and FP helis, pitch and roll are controlled by the angle of attack of the main rotor blades is altered cyclically by the tilt of the swashplate, during rotation, creating differing amounts of lift at different points in the cycle. The 'cyclic' (control) (Tx right stick in Mode II), achieves this. Go Back

Small grommet or 'O'-ring like rubber 'washers' that fit over each end of the feathering shaft next to the head block and allow slight resilience to accommodate the forces on the blades during flight. They come in different grades for softer or sharper control response. Go Back
Direct current: a 'smooth' source of current at a particular voltage (current x voltage = power) having fixed polarity, as from a battery. AC or ac (alternating current) alternates in polarity at a particular frequency. Whilst the brushless motors so common in helis are dc motors, they require an ESC connected between the battery and the motor to provide a supply of timed pulses to make them work. Go Back
Dual Rates: see 'Rate'. Go Back
Direct To Swash: cyclic/collective control mechanics using direct links between servos and swashplate that do not involve additional pushrods, bell cranks, levers and bearings. Go Back

Whilst IC driven heli size numbers are often refer to engine size, those of electrics are a little more obscure. Simply put, indoor, sub-micro or mini models (150mm-300mm diameter rotor weighing 50g to 100g with battery) often have no standardised number and can be flown in a large room. 250 size micros (450mm rotor 330g flying weight) need a small sports hall or decent sized garden really and 400 & 450 (typically 600 & 700mm rotor and 400g & 750g flying weight respectively) 'small' size are good trainers for larger halls or preferably outdoors. A 500 is a 'smallish' heli, but weighs twice as much as a 450 and really does need a field. A 600 (1350mm rotor) is a 'standard' or 'regular' size heli, the biggest production electric to date. Go Back
Elevators are used to pitch the nose up or down. On an planes, the elevator(s) or horizontal stabiliser constitutes hinged control surface(s), usually on the tail. On a heli they don't exist, but the term is still used to describe cyclic pitch. Go Back
End Point Adjustment or Adjustable Travel Volume: limits the range (max and min) or fixes a control channel's output. This is a Tx menu setting that is useful for fixing throttle end points or sometimes gyro sensitivities, but should only be used on non-CCPM helis for cyclic and collective pitch range (for CCPM use Swash Mix). Go Back

Electronic Speed Controller: an electronic module, usually run from a dc battery supply, that feeds power to a brushed or brushless electric motor (the right type must be used). With brushless motors, three wires deliver timed dc pulses that determine the motor's speed and operating characteristics. Often incorporates a BEC to also supply regulated dc power to the heli's avionics (Rx, servos, gyro etc.). Some people choose to by-pass the built-in BEC (because many ESC BECs have limited performance) and provide a separate BEC. Go Back
A Chinese manufacturer of micro size RC helis built down to a very competitive price, with a consequential compromise regarding quality (particularly regarding their rotor head mechanics and electronics). The 'Honey Bee' FP used to be a popular trainer, the 'Honey Bee CP2' was the collective pitch version. Both use a separate electric tail rotor drive, rather than the superior belt drive system used by their slightly larger 'King II' and 'Belt CP' models. Go Back
Exponential: a Tx setting for adjusting cyclic and rudder sensitivity near mid-stick, see 'Rate'. Go Back
The high tensile strength steel rod with threaded ends that passes through the rotor head block and main blade grips and prevents them flying apart, whilst allowing them to pivot in order to control blade pitch. Go Back
'Finless' Bob, actually Bob White. THE RC heli guru in the US, author of many forum help posts and instructional and review videos. See HeliFreak.com and this video list. You need to register to watch or download the videos, but it is easy and free. Go Back
Usually selected via the 'idle up' switch, the flight mode setting determines the response of the heli to the throttle/collective Tx stick by selecting different combinations of throttle curve and pitch curve. Typically, flight modes might be 'normal' for hovering and slow forward flight, 'sport' for fast forward flight and mild aerobatics and 'stunt' for serious aerobatics, sustained inverted flight and '3D' (see Section 5: Flight Modes). It is necessary to use a full pitch range linear pitch 'curve' typical of the 'stunt' setting for head and pitch set-up, but safety precautions are required to avoid throttle-up. Go Back

A short bar with aerodynamic paddles and/or weights at its ends that spins in almost the same plane with the main rotor blades (either just above, but better, just below) and is perpendicular to the main rotors i.e. leading/lagging by 90 deg. It is mechanically linked into the pitch control system on the head (see Bell-Hiller). Its function is to help to control the cyclic movement of the heli and to damp the cyclic response to provide easier control of the model. It can only really be used on two blade rotors. Multi-blade or two blade 'flybarless' systems are gaining in popularity and substitute electronic systems for stabilisation and damping Go Back
Frequency Modulation: see PPM & PCM. Go Back
Fixed Pitch: lift or flying speed is controlled by main rotor speed (RPM) and the main blade (pitch) is not adjustable. Go Back
First Person View: using an on-board camera to fly a heli or plane from the ground as if in the aircraft, often utilising 'virtual reality' headset display monitors and sometimes head motion control of camera direction. Go Back
Often refers to Rx Channel 5. So called from 'plank' usage for 'landing gear', often used on helis for gyro mode switching rate/head hold. Go Back
Spurious control responses usually from rf interference or static charge. Typified by twitching servos or undemanded power variations. Go Back
A device that maintains a pre-set speed (usually of rotation, RPM) irrespective of load. On a heli, this is often a setting on the ESC that maintains a stable maximum head speed irrespective of pitch and throttle curve. Advanced set-ups may use a separate governor with an RPM sensor that monitors the main shaft speed directly, although these are more common on IC helis. Go Back

A device that senses motion (acceleration) and outputs an electrical signal that can be used to provide stabilisation. Normally only used on the yaw axis (rudder) to control the heli's tail. Modern gyros used on RC models are 'solid state' (electronic without large spinning internal components). They come in two flavours, 'rate' and 'AVCS' ('head hold' often abbrieviated to 'HH') (see Section 6). Go Back
See 'AVCS' and 'Gyro'. Go Back
The speed of rotation in RPM of the main rotor head that is driven by the main 'drive shaft', 'axis' or 'mast' via the 'main gear' which meshes with the motor 'pinion'. The motor RPM and the ratio of the number of pinion teeth to the number of main gear teeth sets the head speed range available. More pinion teeth (sometimes abbreviated to 'T') give a higher head speed, everything else being equal (this is how you calculate it). The throttle curve determines the head speed at a particular collective stick position unless a governor is employed. Go Back
Servo Horn: the little plastic or metal lever or cam–like disk that transfers the motion of the servo output shaft to a link. Usually provided with several holes to allow attachment of a link or ball at the optimum distance from the shaft to provide the correct range of movement. Horns are splined (grooved) to fit positively onto the servo shaft: not all manufacturer's splines are the same! Go Back
Many Txs have little trimmer switches or knobs (or you can program knobs to do it), which allow you to increase or decrease the main blade pitch or throttle setting. These take most effect around mid-collective and essentially they modify the pitch or throttle curve that you or the manufacturer set. They have no effect at the extreme low or high collective positions. People used to set up helis in normal (hover) flight mode to hover at 'mid stick', which is where these little fellers came in. Now, we more often tailor the normal mode pitch and throttle curves to the idle up curves to minimise the transitions between modes, or just fly all the time in idle up, where mid stick may be zero pitch! So hover trims are less useful now, except on non-programmable Txs, which have no other pitch or throttle curve adjustment. On all Txs that have them, set them to neutral prior to head set-up. Go Back
Internal Combustion (engine or motor): used on RC models before electric power became practicable, still in wide use, burning petrol ('gas') or, more commonly, nitro methane/methanol/oil ('nitro' or 'glow plug') fuel mixes. Helis using these power sources are called 'gassers' and 'nitros'. Go Back
Also 'flight mode' or 'devil switch'. Usually found on the top left of the Tx, occasionally top right, often with three toggle positions, 'normal', 'idle–1' & 'idle–2'. Sometimes ST is substituted for 'idle'. Many newbies have fallen foul of it because 'idle' implies slow running. This is often quite the opposite, since the throttle curve for idle–1 and idle–2 is often between 80% and 100% at low stick. It is necessary to use a full pitch range linear pitch 'curve' typical of the 'idle up' setting for head and pitch set-up, but safety precautions are required to avoid throttle-up. Go Back
The 'Kv rating of a motor (usually applied to brushless motors) is the speed (rpm) the motor does per volt. The voltage is usually the LiPo battery voltage. Go Back
Local Hobby Store (or Shop). Go Back
The component of the aerodynamic forces acting on a wing or rotor blade at right angles to the airflow that is used to oppose gravity (allows flying). Go Back

More correctly 'lithium-ion-polymer', LiPo battery technology (not to be confused with the lithium-ion batteries they evolved from) provides improved power to weight performance and higher peak power delivery for main flight power than the older nickel cadmium (NiCd) and nickel metal hydride (NiMH) cells often still used to power Txs. However, they do not have a rigid protective case and must be protected from mechanical damage (see picture) as well as over-charging and over-discharging. Gross ill-treatment can result in permanent damage ('puffing') due to overheating or even fire/explosion. Go Back
The mechanical or electronic combination of control inputs and/or outputs by differing proportions or according to different programed rules. Mechanically done using 'mixing arms' or levers, as on a main rotor head. Electronically done in a 'computer' transmitter microprocessor or using on-board electronics; see 'CCPM'. Go Back
In our context: Transmitter Mode. The convention for control functions on a 2 'joystick' Tx.
Mode I: left stick: fore & aft cyclic and left/right yaw:
right stick: throttle/collective & left/right cyclic
Mode II: left stick: throttle/collective & left/right yaw:
right stick: fore & aft cyclic and left/right cyclic
Mode III: left stick: fore & aft cyclic and left/right cyclic:
right stick: throttle/collective & left/right yaw
Mode IV: left stick: throttle/collective & left/right cyclic:
right stick: fore & aft cyclic and left/right yaw
So, Mode III is a 'left-handed' version of Mode II and Mode IV is a 'left-handed'
version of Mode I.
Mode II is in bold since it's the most common in the UK and US for helis and is closest to
the controls of a full size heli (just in case you own one!).
I'm left handed but still use Mode II.
For some nice pictures go
here.
Go Back
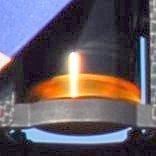
A brushless dc motor that spins its outer shell around its windings, very common in helis because of its relatively high torque and modest RPM (c.f. inrunners, which have a fixed 'can' and rotating core). Both require a brushless ESC. The picture is of a Scorpion outrunner motor in flight and you can see the rotation from the blurring of the vent holes at the bottom. Go Back
Pulse Code Modulation: see PPM & PCM. Go Back
A maneuver in which the heli rotates around its yaw axis (generally centered through the main rotor shaft on single and coaxial rotored helis). Go Back
Commonly used in swashplate set-up menus (SWASH MIX) to denote Collective Pitch. Go Back
Pitch angle: angle of attack of heli main or tail rotor blades, can be positive or negative. Aeroplane propeller pitch (twist) is measured differently – in distance travelled per revolution. See also cyclic and collective pitch. Go Back
Pitch attitude: results from a pitching movement, where the heli's nose rises or falls relative to the tail, controlled by longitudinal (fore & aft) cyclic inputs (elevator). Not to be confused with blade pitch or collective pitch. Go Back
Relationship between the throttle/collective stick up and down position and collective pitch. On computer radios this is programmed as a curve or (more often) a straight line for each flight mode. On simple radios it is fixed, but there might be a 'hover pitch' knob for fine adjustment. Usually has an associated 'throttle curve' with the exception of the throttle hold or 'hold', which has its own pitch curve for 'autos' when the throttle is overridden. It is necessary to use a full pitch range linear pitch 'curve' typical of the 'stunt' setting for head and pitch set-up, but safety precautions are required to avoid throttle-up. Go Back

A measuring device used in setting up CP helis that clamps on the main rotor blade and allows the blade pitch angle to be accurately measured or set, relative to a reference (usually the flybar). Go Back
The mechanical system on a tail rotor assembly that performs a similar function to the collective pitch adjustment function of the swashplate. It changes the tail blade pitch collectively to provide the anti-torque control and rudder function for yaw maneuvers and is operated via a push rod and lever linkage actuated by the tail rotor pitch servo (usually assisted by the gyro). Go Back
Vaguely derogatory slang used by rotary aircraft RC pilots to describe a fixed wing model aircraft. (Also used by 'plank' fliers and those, including me, who fly both, although I suspect that the term might originally have been used to differentiate flying wing 'blended' designs from those with a separate fuselage and wing). 'Foamy' or 'Foamies' is used to describe 'planks' made out of expanded foam such as Depron, EPP, EPS, EPO, Elapor and Styrofoam. Go Back
Pulse Position Modulation: see PPM & PCM. Go Back
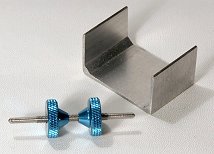
A simple balance consisting of a spindle and two disk shaped clamping pieces that can be used to check the balance of an aircraft propellor or two small helicopter blades clamped together at the root and aligned in opposition at 180 deg. Go Back
A really confusing term that is used several different ways in RC talk.
Dual/triple rates or D/R: a Tx switch and menu setting to adjust the sensitivity of the elevator, aileron and rudder controls by changing the 'steepness' of the characteristic. Usually coupled with an 'expo' function that makes the response non-linear to tame or enhance the stick sensitivity near centre. Go Back
Roll, pitch or yaw rate: the rate of change of attitude or direction e.g. the yaw or pirouette rate in HH mode depends on rudder stick deflection from neutral. Go Back
Rate mode: differentiates gyro 'rate mode' (which loosely controls a heli's tail, but doesn't lock its heading) from 'head hold' or AVCS. Go Back
Remote Control: could mean 'Radio Control' but that would exclude infra-red systems used on toy helis. Go Back
Mixes main rotor pitch with tail rotor pitch so that the anti-torque effect is maintained at all collective settings (i.e. the tail blade pitch is increased at high collective to tame the tendency of the heli's tail to twitch to the right if the throttle/collective is suddenly increased). Only used with rate gyros. Should NEVER be used with HH gyros. Go Back
Radio Frequency: electromagnetic radiation emitted by the Tx and received and decoded by the Rx. Brushed motors and speed controllers are sources of rf interference due to sparking and high currents that can cause 'glitching' of the heli's control system. Brushless motors are much better in this respect and 2.4GHz systems are virtually immune from rf interference although static electricity from belt drive tail rotor systems can occasionally affect them. Go Back
Tilting sideways; a change in attitude where the heli leans or rotates about its length controlled by lateral cyclic inputs (aileron). If the roll is not stopped, it eventually becomes inverted whilst maintaining its heading. Go Back
The rudder is used to turn to left (port) or right (starboard). On planes, the rudder is a hinged control surface on the vertical stabiliser at the tail. On a heli it doesn't exist, but the term is still used to describe the anti-torque control, which usually works by controlling the tail rotor blade pitch (or, in simple models, RPM). Operated using pedals on full size planes and helis, the rudder control on model helis shares the Tx left stick (in Mode II) with the throttle/collective. The rudder function is the lateral stick movement. Go Back
Radio receiver (on the model), demodulates the signal from the Tx and turns it into pulse streams on a number of channels that drive the servos or ESC. Go Back
Scorpion Power System. Popular maker of brushless motors and ESCs. Also see 'outrunner. Go Back

Electronic/electro-mechanical device using a dc micro-motor driving gearing and a position sensing potentiometer that translates electrical pulses into mechanical movement with sufficient power, speed and precision to drive aerodynamic control surfaces or other on-board devices. Linked to the swashplate or tail rotor pitch control rod using a 'servo horn' – essentially a lever with several linkage positioning holes. Go Back
Simulator: PC or Mac application that models the flying environment and aircraft flight characteristics as closely as possible from a ground based perspective (as in model flying). Not to be confused with products like MS Flight Simulator, a 'training sim' is a serious tool for practicing new RC flying skills with realistic simulations of real life RC model helis, powered planes and gliders. The sim is usually controlled using a real or dummy Tx. Go Back
High quality Chinese manufactured 'clones' of Align helis and mechanics. Go Back
Winding up the main rotor from 0 RPM to the operating RPM (head speed), by applying power via the throttle/collective. Most ESCs provide different spool-up rates as a safety feature or 'scale effect' and to protect gear teeth. Go Back
Includes fast forward flight and mild aerobatics. 'Scale flying' is tamer but elegant, 3D wilder. Go Back
Stunt: a 'stunt mode', ST-1, ST-2 or ST-3. Flight modes suitable for fast forward flight, sport flying and 3D. Also known as 'Idle up' modes. Go Back
Like trim but applied to individual un-mixed control channels; it stays the same for all flight modes on a particular model. Go Back
SWASH MIX is a Tx menu for CCPM set-up of CP helis allowing the collective pitch range (and direction) and cyclic pitch (attitude) and roll ranges (and direction) to be separately adjusted. Also called Adjustable Function Rate (AFR) by Futaba. Go Back
A swashplate is a mechanical device that translates the motion of a rotating shaft into reciprocating (oscillating) motion. A heli swashplate is a pair of plates, one rotating and one fixed, that are centered on the main rotor shaft and are coupled together, usually by a large ball bearing. The rotating plate is linked to the rotor head and the fixed plate is linked to the servos. Displacement of the fixed plate from level is transferred to the rotating plate, where it causes a reciprocal motion of the rotor blade linkages as the main rotor shaft turns. This type of pitch control, known as cyclic pitch, allows the helicopter rotor to provide selective lift in any direction. Go Back
The mechanical and electronic swashplate installation:
SWH1: '1 servo' non-CCPM, independent aileron and elevator servos
(also a pitch servo if CP)
SWH2: 2 servo 180 deg: CCPM, aileron and pitch servos work together, separate elevator linkage
SWH4: 4 servo 90 deg: CCPM using aileron, pitch and two elevator channels
SR-3: 3 servo 120 deg: CCPM with forward positioned aileron and pitch servos, rear elevator
SR-3s: as above with 1:1 geometry (not 120 deg)
SN-3: as SR-3 rotated 90 deg so aileron is one side and elevator and pitch fore and aft on the other side.
Go Back
Derives from IC engines, the air/fuel mixture control (gas pedal or accelerator in cars). On an electric powered model, the 'Throttle Channel' (usually Channel 1 or 3) controls the motor speed via an ESC. On CP helis, the throttle control is shared with the collective on the left Tx stick in Mode II (forward and back movement only, lateral movement is rudder). Go Back
Relationship between the throttle/collective stick up and down position and throttle percentage. This, along with choice of motor, pinion and main gear, determines the head speed. On computer radios the throttle curve is programmed as a straight line or (more often) a curve for each flight mode. On simple radios it is fixed, but there might be a 'hover throttle' knob for fine adjustment. Usually has an associated 'pitch curve'. Go Back
A Tx function that can be allocated to a switch (often the trainer switch) to prevent the throttle/collective stick raising the throttle until the setting is defeated. Can normally only be selected at low throttle to prevent unintended 'dead stick' i.e loss of power during flight. Not to be confused with throttle hold (see below). Go Back
A Tx function that is often allocated to a right hand top switch (occasionally the top left) that sets the throttle to a pre-determined value (usually low) but does not alter the collective. Often has its own pitch curve. Used for safety and for practicing autorotations. Not to be confused with throttle cut. Go Back
Alternately 'moment of force'. A vector (directional force) that measures the tendency of a force to rotate an object about an axis. In more basic terms, torque (twist) measures how hard something is rotated. On a heli, the rudder control (usually via a tail rotor) is an 'anti-torque' device stopping the reaction force from the main rotor spinning the fuselage around uncontrollably, whilst allowing yaw control. Go Back
An alternative to the more common belt driven tail rotor, where the tail drive is via a rotating shaft inside the boom and two pairs of gears translating the drive direction through 90 deg at the main shaft take off and at the tail. This is supposed to offer the advantages of quieter operation and lower power loss, although it may be less robust than the conventional toothed belt and pulley arrangement. It certainly reduces static electricity build up, which is of benefit on one or two susceptible designs, the Trex 500 being one of them. Go Back
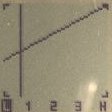
Rotor blades are tracking correctly when both spin in the same plane without one being higher or lower i.e. both blades travel through the same airspace created by their spinning. If the rear blade is following the front blade on a higher or lower plane, then it can cause a lot of unwanted vibrations for the RC helicopter. Tracking is corrected by separately adjusting one blade pitch link, turning >< into ----. Go Back
A spring loaded switch usually on the upper right of the Tx. Used in conjunction with a 'trainer cord' or connection to a 'slave' Tx used by a pupil. The instructor uses the trainer switch on the 'master' Tx to temporarily switch partial or complete control of the heli to the pupil. Can also be programmed on some Txs for other purposes such as triggering cameras or enabling/disabling throttle cut. Go Back
The transition from hovering, where the heli is airborne but going nowhere, to forward flight, during which translational lift (see below) kicks in and the flight dynamics and the effect of the controls effectively change. It also covers the reverse process from cruise to hover; both phases will probably also include some climbing and descending. Go Back
Not to be confused with 'transitional' (see above). The extra lift created when a heli's forward speed increases from the hover and increased airflow over the advancing blade increases its lift efficiency. Go Back

'Small' 5/6 channel CP electric heli, 850mm long, main rotor diameter 970mm, flying weight 1.7kg.
The Align Corporation is a Taiwanese engineering company that makes superior quality micro, small and regular sized RC helis – the well known and respected 'Trex' or 'T-Rex' range. Go Back
Fine adjustment of attitude using the cyclic and rudder trim adjusters on the Tx to promote level, static hovering with no yawing and encourage predictable (straight & level) forward flight. Before making control adjustments, the airframe should be balanced so that the heli is level (or very slightly nose heavy) when supported at the blade grips (or more accurately using the flybar as a pivot). Simple Txs have 4 trim sliders next to the two joysticks. Computer radios have similar looking buttons ('digital trims') that set the trim for each model. Some Txs allow you to set different trims for different flight modes as well. For trim settings that do not change with flight mode and operate un-mixed on individual control channels, use sub-trim e.g. for aligning servo horns. Go Back
Radio transmitter (in your hand), sends a modulated signal to be picked up by the Rx. 'Computer' Txs incorporate a microprocessor that can be programed by the pilot to control different models in different ways. Go Back
An innovative Chinese manufacturer of generally budget products who, however, seems to lead the field in sub-micro RC helis. The Walkera 3#4 is only 185mm long with a main rotor diameter of 180mm and a flying weight of about 50g. Go Back
In RC heli parlance, the washout assembly usually sits above the swashplate and below the flybar on the main rotor head and can slide up and down with the swash on guide pins. The washout has mixer arms or levers; two connect directly to the top of the swashplate and two link to the flybar cage so that pilot's pitch inputs are mechanically mixed with the inputs from the flybar and control the pitch of the main blades through a set of linkages and joints. When you're talking about a wing or a rotor blade, washout is a twist in the blade so that part of it is at a different angle of attack to the rest, allowing you to recover from a stall before it's too late. You tell me what the connection is! Go Back
Wooden main rotor blades (sometimes containing weighted inserts), an alternative to plastic, carbon reinforced plastic, glass fibre or carbon composite. Cheap woodies are great for learning (although there are superior 'performance' products too), they are light and in a crash can cause less damage to head components (they are to some extent 'sacrificial') and property than the tougher blades (I still wouldn't want to be hit by one though...). Do not overspeed them. Go Back
A yawing movement is where the heli's orientation or heading is changed by rotating the nose to one side or the other (pivoting about the main rotor (mast)), using the rudder control. Go Back
<1 All the above, I hope ;>)
<< 1 Intro 2 Helis 3 Safety 4 Head 5 Radio 6 Tail 7 Motor 8 Blades 9 Pitch 10 Test
Go to next section – 12. Where on earth do I get that? >
<<< ChopperAddict home <<< GatleyGallery RC Helis
© John E Wilson 2010 with thanks to Wikipedia & RCHelicopterWiki for inspiration & confirmation and to my friend and colleague Bill Boley for the in-flight photos.